

1.概述
无人机飞控科研平台是集教学与科研目的为一体的多功能实验台,其在满足日常学生教学实验的同时,兼顾无人机飞行控制及力学等学科专业的科学研究。平台主要由实时仿真器、三维飞行视景系统、地面站系统、遥控器和飞控板组成。
2.系统特点
基于Links-RT实时仿真系统的无人机飞控科研平台具有如下特点:
1. 基于模型的设计思路;
2. 支持多旋翼、固定翼等小型无人机飞控系统设计验证;
3. 支持飞控快速控制原型
4. 支持PIXHAWK和APM
a) 提供专门的SIMULINK模块库,包括传感器、舵机、GPS、控制模式、链路接口等;
b) 支持模型预测控制、滑模变结构等复杂控制算法的直接代码生成;
c) 支持控制器自定义参数的在线修改;
5. 支持硬件在回路仿真试验
a) 基于Simulink建立飞机动力学模型;
b) 实时仿真机和飞控完成硬件闭环;
c) 支持在线调参和曲线监视。
系统结构设计
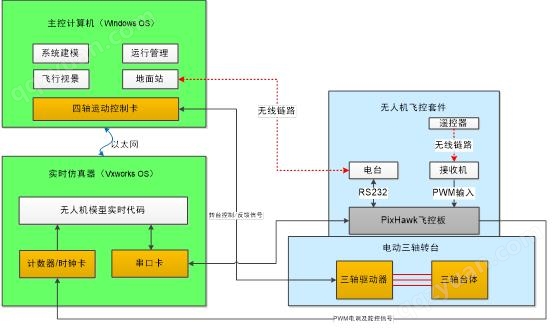
无人机飞行仿真实验平台采用“上-下"位机架构,上位机是1台Windows主控计算机,是用户进行控制系统设计和试验运行管理的环境;下位机是1台实时仿真器,运行无人机动力学、传感器及大气环境模型实时代码,并通过I/O通道与飞控板实现连接。具体工作流程如下:
1)试验人员通过遥控器发送无人机操控指令;
2)飞控板通过接收机接收操控信息,经计算后输出PWM电调和舵控指令;
3)实时仿真器通过计数器/时钟卡接收PWM信号,并实时计算无人机动力学模型、GPS和加速度计模型、大气环境模型等,并通过串口向飞控板反馈GPS和加速度计信号;
4)通过实时仿真器通过以太网向主控计算机发送无人机姿态(俯仰角、偏航角、滚转角),以及经、纬、高等飞行信息;
5)主控计算机部署四轴运动控制卡,根据接收到的无人机姿态信息,控制三轴驱动器,进而控制三轴转台实现与无人机动力学模型输出姿态的同步运动;
6)飞控板置于三轴转台上,集成于飞控板的MEMS陀螺将敏感三轴姿态信息,如此构成闭环飞控回路;
7)主控计算机上面部署的飞行视景软件将实时显示无人机动态飞行画面,同时地面站软件通过无线链路与飞控实现通信。
系统的总体架构如下图所示:






所有评论仅代表网友意见,与本站立场无关。